
Arthur Jakobsson
Robotics Researcher @ CMU
Birds, photography, and computer science.
Hi! I'm a full-time masters student at Carnegie Mellon University working in the Momentum Lab with Professor Jeff Ichnowski. I'm applying to PhD programs in computer vision and robotics for Fall 2026, and I'm specifically excited about machine learning-enabled soft and articulated object manipulation, high-speed manipulation, and creative sensing.
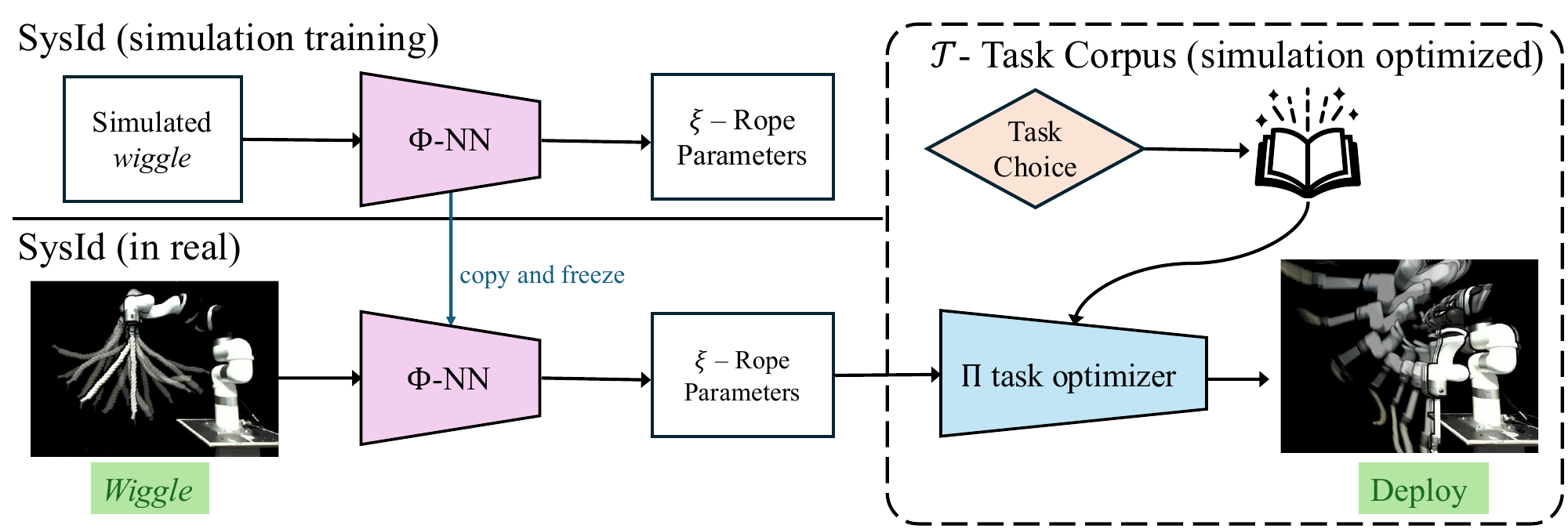
My most recent work is Wiggle and Go, a system that enables a robot to swing ropes at 3D targets zero-shot: by observing a few seconds of rope motion, predicting physical parameters, and conditioning a goal-directed policy on them. In my undergrad, I was part of the SBPL Lab, advised by Professor Maxim Likhachev where I worked on machine learning for multi-agent path-finding.
From 2022 to 2025 I served as a TA, lead TA, and then course instructor, for 15-122 Principles of Imperative Computation. I built and ran the bootcamp series now used across the course — over 3,000 cumulative student attendances. Teaching matters to me and I hope to get to keep teaching as I continue my academic career!
Outside of research I love birdwatching, photography, biking, and badminton.
Preprint · 2026 · First-author
Wiggle and Go.
A single mistake in a dynamic throw can be unrecoverable. We use a brief wiggle to identify rope dynamics, then perform goal-conditioned manipulation in one shot.
Updates
News
- Excited to be starting my internship at DENSO Innovation Lab this summer! I will be working on research in AV vision and perception with simulations.
- First-author preprint posted: Wiggle and Go! — zero-shot dynamic rope manipulation with the Momentum Lab.
- Two co-authored papers accepted to ICRA 2026: ExpReS-VLA and Adversarial Game-Theoretic Grasp Synthesis.
- Started full-time masters at Carnegie Mellon, focused on computer vision and robotics.
- ICRA 2025 paper accepted: Work Smarter Not Harder with the SBPL Lab.
- Wrapped up four years as TA for 15-122 (2022–2025).
- ICAPS 2024 paper out: Improving Learnt Local MAPF Policies with Heuristic Search.
- Received the "Coolest Graphs" award in 36-402 Statistical Computing: Manrattan - A Look into NYC's Rats .



